



هوش مصنوعی انجام وظایف پیچیده توسط رباتها را ممکن کرد
به گزارش خبرنگار خبرگزاری علم و فناوری آنا، حوزه رباتیک در سالهای اخیر، شاهد پیشرفتهای سریعی بوده و سیستمها قادر به انجام وظایف پیچیده شدهاند. موردی که رباتها هنوز با آن دستوپنجه نرم میکنند، استفاده از کل بدن است، مهارتی که انسانها معمولا در آن برتری دارند.
حمل یک بسته بزرگ و سنگین را در نظر بگیرید. هر انسان میتواند انگشتان خود را باز کند و جعبهای را با هر دو دست بلند کند، سپس آن را به سینه خود تکیه دهد و آن را روی ساعد خود قرار دهد، در حالی که از کل بدن برای حرکت جعبه استفاده میکند. در مقابل، ربات باید تمام مکانهای روی انگشتان، بازوها و قفسه سینه حامل را در نظر بگیرد. برنامهریزی برای این کار به دلیل تعداد زیاد رویدادهای تعاملی ممکن، بهسرعت غیرممکن میشود.
بهعنوان یک راه حل احتمالی برای این موضوع، گروهی از محققان «امآیتی» (MIT) یک فرآیند برنامهریزی غنی از تماس را توسعه دادهاند که این روند را ساده میکند.
در این بیانیه آمده است: «این فرآیند از یک تکنیک هوش مصنوعی بهنام هموارسازی استفاده میکند که بسیاری از رویدادهای تماس را در تعداد کمتری از تصمیمات خلاصه میکند تا حتی یک الگوریتم ساده بتواند بهسرعت یک برنامه دستکاری موثر را برای ربات شناسایی کند.»
یادگیری تقویتی نیاز به میلیونها سال زمان دارد
رباتها معمولا برای استفاده از یادگیری تقویتی ساخته میشوند. این تکنیک یادگیری ماشین، ربات را تشویق میکند تا از طریق آزمون و خطا، کاری را به پایان برساند و پاداشی برای نزدیکتر شدن به هدف دریافت کند. در نتیجه نیاز سیستم به یادگیری در مورد جهان خارج با آزمون و خطا از یک روش جعبه سیاه استفاده میکند.
با این حال، این روش آزمون و خطا نیاز به پردازش زیادی دارد، زیرا ممکن است میلیاردها مکان لمس بالقوه وجود داشته باشد که یک ربات باید هنگام تصمیمگیری در مورد چگونگی استفاده از انگشتان، دستها، بازوها و بدن خود برای ارتباط با یک مورد در نظر بگیرد. یادگیری تقویتی ممکن است نیاز به طی میلیونها سال در زمان شبیهسازی داشته باشد تا بتواند یک سیاست را یاد بگیرد.
در مقایسه، فرآیند هموارسازی، یادگیری تقویتی را قادر میسازد تا به خوبی عمل کند. بسیاری از انتخابهای یک ربات هنگام انتخاب نحوه مدیریت یک آیتم قابل توجه نیستند.
با تلاش بسیاری از سایتهای تماس و سپس محاسبه میانگین وزنی نتایج، یادگیری تقویتی به طور ضمنی هموارسازی را انجام میدهد. براساس این درک، محققان امآیتی یک مدل ساده با هموارسازی قابل مقایسه ایجاد کردند که بر تعاملات ضروری ربات تمرکز کرده و رفتار طولانیمدت را پیشبینی کنند. آنها نشان دادند که این استراتژی میتواند برنامههای پیچیدهای همانند یادگیری تقویتی ایجاد کند.

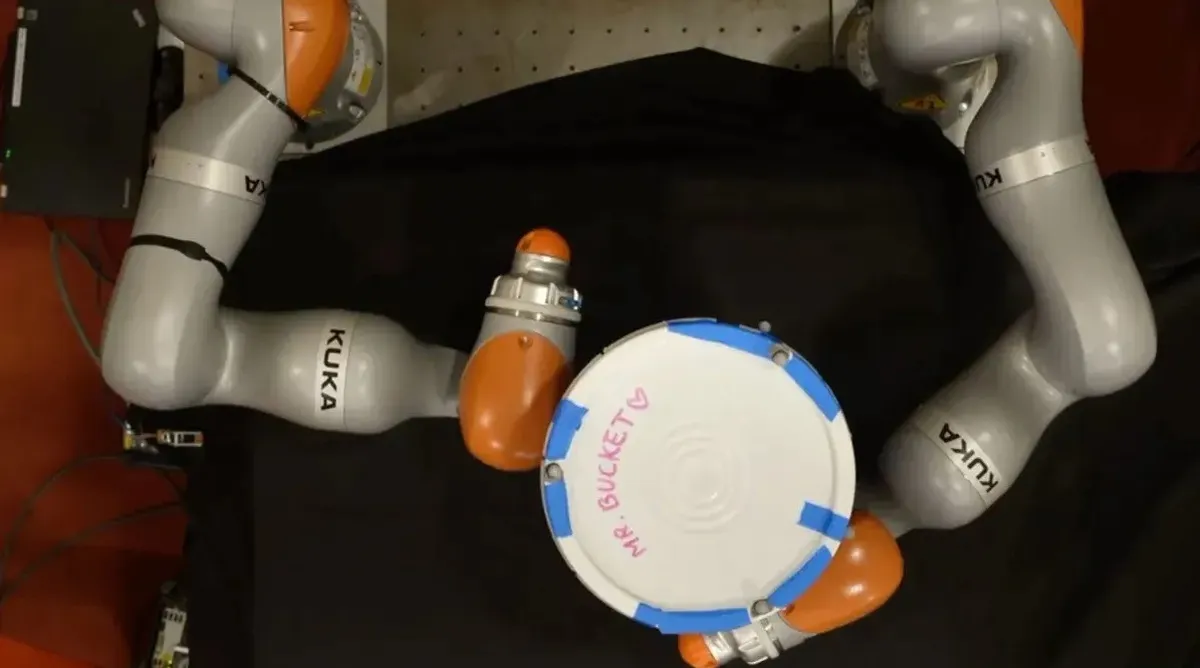
در شبیهسازیها، محققان روش خود را زمانی آزمایش کردند که دستهای رباتیک وظایفی مانند حرکت قلم به یک پیکربندی مشخص، باز کردن یک در یا برداشتن یک ظرف را بر عهده داشتند. در هر مورد، استراتژی مبتنی بر مدل آنها زمان بسیار کمتری برای تولید نتایج مشابه یادگیری تقویتی صرف کرد. زمانی که آنها از بازوهای رباتیک واقعی برای تایید مدل خود در سختافزار استفاده کردند، نتایج قابل قبولی به دست آوردند.
همان ایدههایی که دستکاری کل بدن را ممکن میکنند، برای برنامهریزی با دستان ماهر و شبیه به انسان نیز کار میکنند. تا پیش از این، اغلب محققان میگفتند که یادگیری تقویتی تنها روشی است که به دستهای ماهر مقیاس میدهد، اما این تحقیق نشان داد که با در نظر گرفتن این ایده کلیدی هموارسازی از یادگیری تقویتی، آنها میتوانند روشهای برنامه ریزی سنتیتر را نیز به خوبی انجام دهند.
مدلی که آنها ایجاد کردهاند، خامتر از واقعیت است، نمیتواند حرکات بسیار پویا و مواردی از این دست را مدیریت کند. اگرچه روش آنها کارآمد است، اما قادر به ارائه راهکاری نیست که بهعنوان مثال به یک ربات اجازه دهد یک قوطی را به داخل سطل زباله پرتاب کند. محققان در حال حاضر قصد دارند روش خود را در آینده بهبود دهند تا بتوانند از پس این حرکات بسیار پویا برآیند.
انتهای پیام/




















