 و روایت ماندگار عاشورا")



کنترل پهپاد با استفاده از سیگنالهای عضلانی
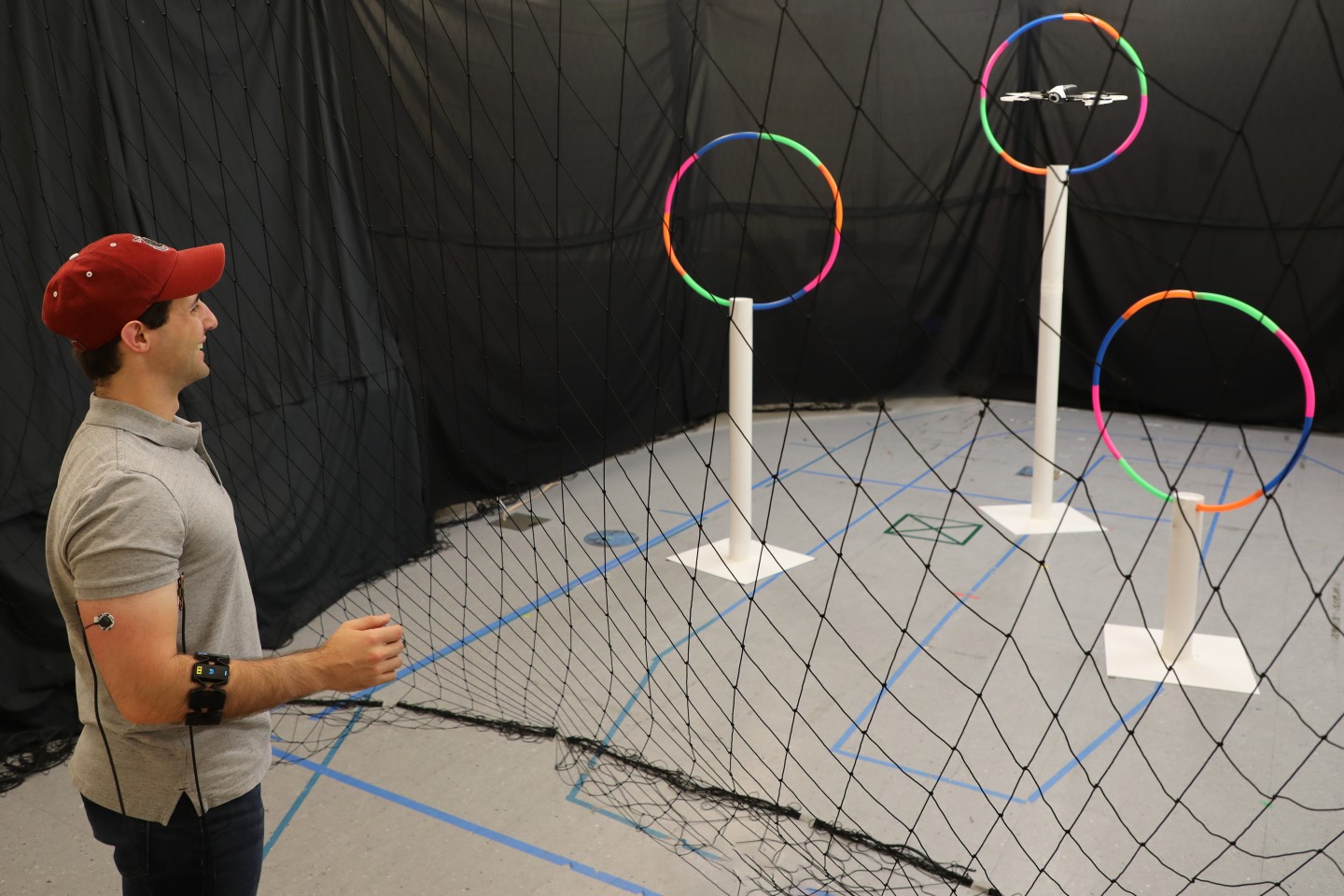
به گزارش خبرنگار حوزه علم، فناوری و دانشبنیان گروه دانشگاه خبرگزاری آنا از نیو اطلس، کنترل پهپادها معمولاً توسط یک کنترلر جویاستیک انجام میشود، اما دانشمندان دانشگاه MIT یک سیستم کنترل مبتنی بر درک و انتقال مستقیم تولید کردهاند که سیگنالهای عضلانی اپراتور را میخواند.
این مجموعه آزمایشی معروف به Conduct-A-Bot، از حسگرهای الکترومیوگرافی (که فعالیت الکتریکی را تشخیص میدهد) و سنسورهای حرکتی استفاده میکنند (الکترومیوگرافی تکنیکی است برای محاسبه و ضبط حالات عضلات بدن در مواقع انقباض و انبساط). این سنسورها در ناحیه عضله بازو و ساعد دست راست کاربر پوشیده میشوند. سنسورها با هم کار میکنند و فعالیت عضلات و حرکت بازو را ردیابی کرده و آن دادهها را به یک ریزپردازنده سیمی انتقال میدهند.
سپس از الگوریتمهای مبتنی بر یادگیری ماشین (هوش مصنوعی) برای شناسایی اقدامات مختلف بازو استفاده میشود، که هر یک برای تبدیل به یک فرمان خاص از قبل برنامهریزی شده است. این دستورات سپس بهصورت بیسیم به کوادکوپتر منتقل میشوند، که درنتیجه واکنش نشان میدهد.

در تنظیم فعلی، سفت شدن بازوی فوقانی پهپاد را متوقف میکند. مشت کردن دست آن را به جلو حرکت میدهد. چرخاندن مشت در جهت عقربههای ساعت یا خلاف جهت عقربههای ساعت باعث چرخش آن میشود. و تکان دادن دست به سمت بالا، پایین، چپ یا راست آن را به کنار یا افقی حرکت میدهد.
در آزمایشهای اخیر که در آن پرواز پهپاد از طریق حلقهها انجام شد، این پهپاد به 82درصد از 1500 دستور پاسخ صحیح داد، که انتظار میرود با پیشرفت بیشتر سیستم، این رقم بهبود یابد.

این سیستم را میتوان روی هر مدل پهپاد استفاده کرد، و درواقع پیش بینی شده است که این فناوری درنهایت ممکن است در برنامههایی مانند کنترل روباتهای کمکی برای افراد سالخورده به کار گرفته شود.
یکی از سازندگان این سیستم گفت: این سیستم به ما اجازه میدهد تا با کار کردن روی روباتها، آنها را به ابزارهای مؤثر و باهوشتر برای کارهای روزمره تبدیل کنیم.
انتهای پیام/4112/
انتهای پیام/




















