
نگاهی به دستاوردهای کارگاه مهندسی معکوس دانشگاه آزاد اسلامی واحد سیرجان


ایرج راد در گفتگو با آنا:

طراحی یک ربات تبدیلشونده برای استفاده در سفرهای فضایی +فیلم
به گزارش خبرنگار خبرگزاری علم و فناوری آنا به نقل از نیواطلس، در فضاپیماها یا ایستگاههای فضایی باریک، معمولاً جایی برای نگهداری چند ربات که هر کدام برای کار خاصی طراحی شدهاند، وجود ندارد. سیستم «موری۳» (Mori۳) با در نظر گرفتن این واقعیت طراحی شده است، زیرا در صورت نیاز میتوان از آن برای ایجاد انواع مختلفی از رباتها استفاده کرد.
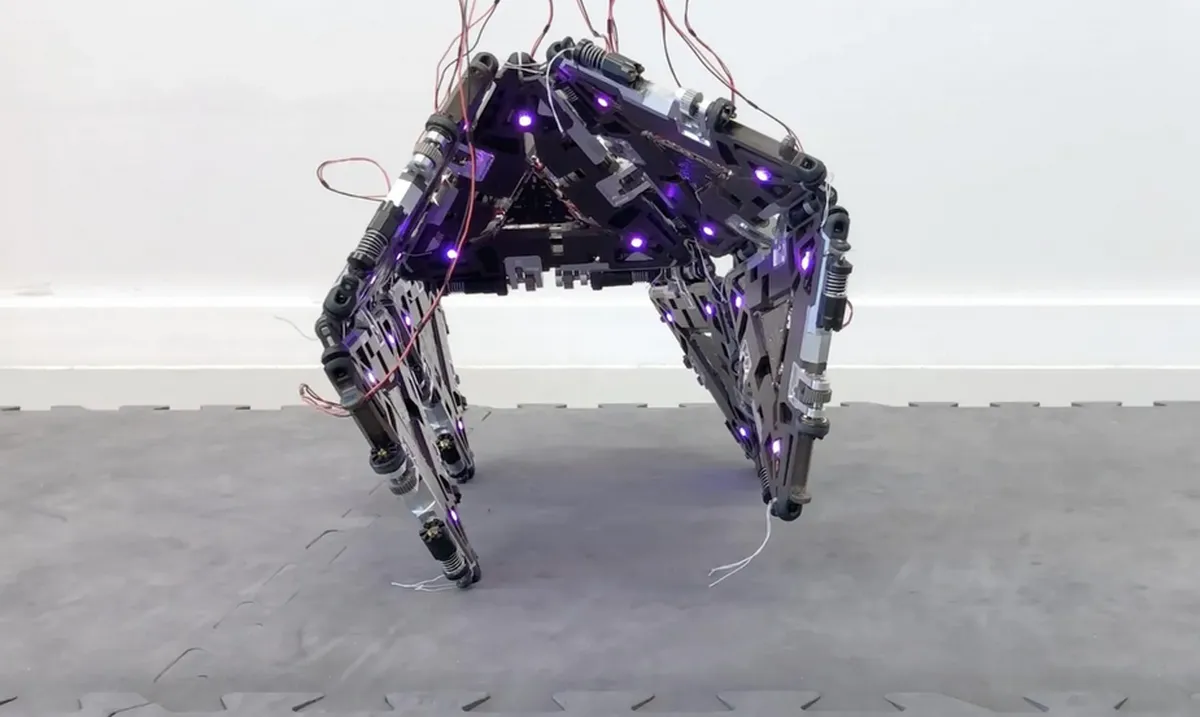
ربات «موری ۳» که توسط پروفسور «جیمی پیک» و همکارانش در موسسه تحقیقاتی EPFL سوئیس توسعه داده شده است از چندین ماژول مثلثی تخت مجهز به الکترونیک (مانند موتورها، باتریها و سنسورها) و مکانیزمهای مکانیکی تشکیل شده است. در فرآیندی به نام مشبندی چندضلعی، تعدادی از این ماژولها را میتوان در امتداد لبهها به هم متصل کرد و یک ربات سهبعدی چندضلعی شکل را تشکیل داد.
اندازه و پیکرهبندی آن چندضلعی، بسته به وظیفه ربات، متفاوت است. در میان چیزهای دیگر، این ربات میتواند روی چهار پا راه برود، خود را به صورت یک بازوی رباتیک دربیآورد یا مانند چرخ بغلتد. همچنین تعدادی از این رباتها میتوانند در صورت لزوم به یکدیگر متصل شوند و به طور موقت به یک ربات بزرگتر تبدیل شوند.
به گفته دانشمندان، رباتهای «موری ۳» در انجام سه کاری که رباتها باید قادر به انجام آن باشند، یعنی حرکت با نیروی خود، تعامل با کاربران انسانی و جابجایی و حمل و نقل اشیا عملکرد بسیار خوبی دارند. امید است که در نهایت بتوان از آنها برای کارهایی مانند کمک به فضانوردان در فضاپیما یا انجام تعمیرات خارجی استفاده کرد.
پیک میگوید: «رباتهای چند ضلعی و چند شکلی که برای ایجاد ساختارهای مفصلی به یکدیگر متصل میشوند، میتوانند به طور موثر برای کاربردهای مختلف استفاده شوند. البته، یک ربات همه منظوره مانند «موری ۳» نسبت به رباتهای تخصصی که در زمینههای خاص استفاده میشوند موثرتر خواهد بود. با این حال، بزرگترین نقطه قوت «موری ۳» تطبیق پذیری آن است.
اخیرا مقالهای در مورد این فناوری در مجله نیچر منتشر شده است.
انتهای پیام/




















