


در آیین بزرگداشت شیخ شهابالدین سهروردی تأکید شد

اشتباه فاجعهبار پلیس در ثبت یک علامت تایپی
پیشرفت جدید میتواند حوزه میکرورباتهای پزشکی را تغییر دهد
به گزارش گروه دانش و فناوری خبرگزاری آنا به نقل از (سای تک دیلی)، تیم پروفسور هونگسو چوی در دپارتمان مهندسی رباتیک و مکاترونیک در موسسه علوم و فناوری Daegu Gyeongbuk (DGIST) به منظور ایجاد فناوری که میتواند بیش از ۱۰۰ میکروربات در دقیقه تولید کند که میتوانند در بدن متلاشی شوند.
روشهای زیادی برای ساخت میکرورباتها با هدف درمان دقیق هدفمند کم تهاجمی وجود دارد. محبوبترین آنها فرآیند چاپ سه بعدی بسیار ظریف است که به روش پلیمریزاسیون دو فوتونی معروف است، که با تقاطع دو لیزر باعث پلیمریزاسیون در رزین مصنوعی میشود.
این تکنیک توانایی ایجاد ساختارهایی با دقت در سطح نانومتری را دارد. اشکال این است که زمان زیادی برای ایجاد یک میکروربات واحد صرف میشود، زیرا وکسل ها، پیکسلهایی که با چاپ سه بعدی به دست میآیند، باید به طور متوالی درمان شوند. علاوه بر این، در طول فرآیند پلیمریزاسیون دو فوتون، نانوذرات مغناطیسی موجود در ربات ممکن است مسیر نور را مسدود کنند. هنگام استفاده از نانوذرات مغناطیسی با غلظت بالا، نتیجه فرآیند ممکن است یکنواخت نباشد.
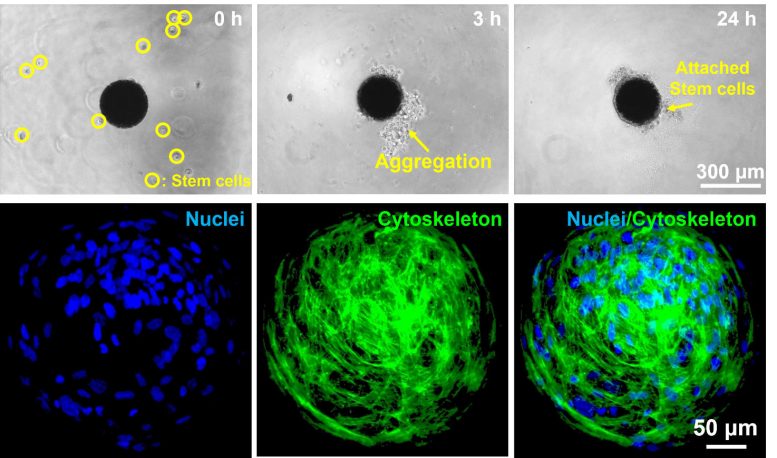
فرآیند ۲۴ ساعته اتصال سلولهای بنیادی به سطح میکروربات (بالا) و رنگآمیزی سلول برای شناسایی سلولهای متصل به سطح میکروربات (پایین) نتیجه میشود.
تیم تحقیقاتی پروفسور هونگ سو چوی برای رفع محدودیتهای تکنیک فعلی تولید میکروربات، روشی را برای ایجاد میکرورباتها با سرعت بالای ۱۰۰ در دقیقه با جریان دادن مخلوطی از نانوذرات مغناطیسی و متاکریلات ژلاتین زیست تخریبپذیر ایجاد کردند که میتواند با نور درمان شود. روی تراشه میکروسیال در مقایسه با رویکرد پلیمریزاسیون دو فوتونی موجود، این میتواند ریزرباتها را بیش از ۱۰۰۰۰ برابر سریعتر ایجاد کند.
سپس میکروربات تولید شده با این فناوری با سلولهای بنیادی شاخک بینی انسان جمع آوری شده از بینی انسان برای القای چسبندگی سلولهای بنیادی به سطح میکروربات کشت داده شد.
از طریق این فرآیند، یک سلول بنیادی حامل یک میکروربات شامل نانوذرات مغناطیسی داخل و سلولهای بنیادی متصل به سطح بیرونی ساخته شد. ربات در حالی که نانوذرات مغناطیسی داخل ربات به میدان مغناطیسی خارجی پاسخ میدهد حرکت میکند و میتواند به موقعیت دلخواه منتقل شود.
تحویل سلول انتخابی در مورد درمان با سلولهای بنیادی موجود دشوار بود. با این حال، میکروربات حامل سلولهای بنیادی میتواند با کنترل میدان مغناطیسی تولید شده از سیستم کنترل میدان الکترومغناطیسی در زمان واقعی، به مکان مورد نظر حرکت کند.
تیم تحقیقاتی آزمایشی را برای بررسی اینکه آیا میکروربات حامل سلولهای بنیادی میتواند با عبور از یک میکروکانال پیچ و خم شکل به نقطه هدف برسد و در نتیجه تایید کرد که ربات میتواند به محل مورد نظر حرکت کند یا خیر، انجام داد.
علاوه بر این، تجزیه پذیری میکروربات با انکوبه کردن سلول بنیادی حامل میکروربات با یک آنزیم تجزیه کننده ارزیابی شد. پس از ۶ ساعت انکوباسیون، میکروربات به طور کامل متلاشی شد و نانوذرات مغناطیسی داخل ربات توسط میدان مغناطیسی تولید شده از سیستم کنترل میدان مغناطیسی جمع آوری شد. سلولهای بنیادی در محلی که میکروربات متلاشی شده بود، تکثیر شدند.
متعاقباً، سلولهای بنیادی برای تأیید تمایز طبیعی به سلولهای عصبی القا شدند. سلولهای بنیادی پس از حدود ۲۱ روز به سلولهای عصبی تمایز داده شدند. این آزمایش تأیید کرد که تحویل سلولهای بنیادی به مکان مورد نظر با استفاده از یک میکروربات امکانپذیر است و سلولهای بنیادی تحویلشده میتوانند با نمایش تکثیر و تمایز به عنوان یک عامل درمانی دقیق هدفمند عمل کنند.
علاوه بر این، تیم تحقیقاتی تایید کرد که آیا سلولهای بنیادی تحویل داده شده توسط میکروربات ویژگیهای الکتریکی و فیزیولوژیکی طبیعی را نشان میدهند یا خیر. هدف نهایی این مطالعه اطمینان از این است که سلولهای بنیادی تحویل داده شده توسط ربات به طور معمول نقش پل خود را در حالتی انجام میدهند که ارتباط بین سلولهای عصبی موجود قطع شده است. برای تایید این موضوع، از نورونهای هیپوکامپ استخراج شده از جنین موش که سیگنالهای الکتریکی را به طور پایدار ساطع میکنند، استفاده شد.
سلول مربوطه به سطح میکروربات متصل شد، روی یک تراشه الکترودی با اندازه میکرو کشت شد و سیگنالهای الکتریکی از نورونهای هیپوکامپ پس از ۲۸ روز مشاهده شد. از این طریق، میکروربات تأیید شد که نقش خود را به عنوان یک پلت فرم تحویل سلولی به درستی انجام دهد.
پروفسور هونگ سو چوی گفت: ما انتظار داریم که فناوریهای توسعهیافته از طریق این مطالعه، مانند تولید انبوه رباتها، عملکرد دقیق توسط میدانهای الکترومغناطیسی، و تحویل و تمایز سلولهای بنیادی، کارایی درمان دقیق هدفمند را در آینده به طور چشمگیری افزایش دهد.
انتهای پیام/




















