



در آیین بزرگداشت شیخ شهابالدین سهروردی تأکید شد
زنبور آهنی MIT به کمک امدادگران میآید
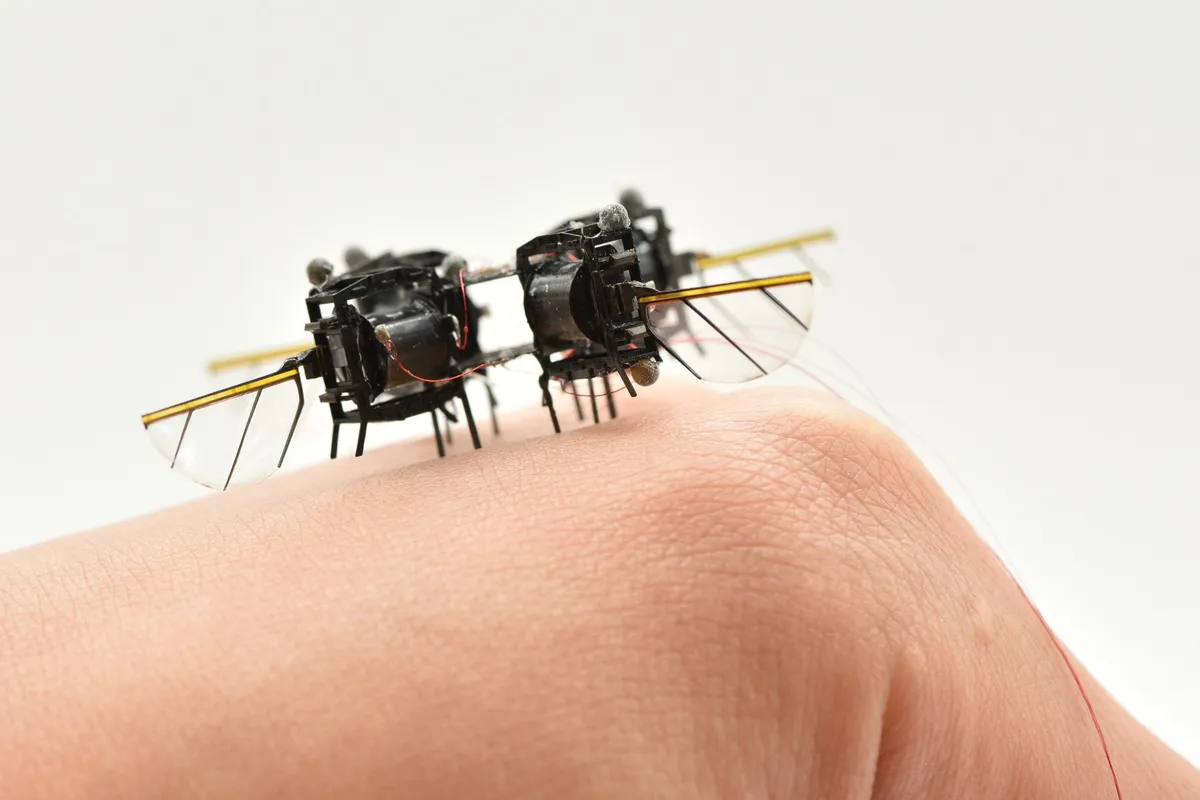
این ربات مینیاتوری که ابعادی برابر با ۴ سانتیمتر و وزنی کمتر از یک گرم دارد، قابلیت نفوذ به فضاهای تنگ و غیرقابل دسترس را فراهم میآورد. طراحی آن به گونهای است که میتواند پس از حوادثی مانند زلزله، با عبور از میان آوار، تیمهای امدادی را از وجود بازماندگان مطلع سازد. کوین چن، دانشیار دپارتمان مهندسی برق و علوم کامپیوترامآیتی و از نویسندگان این پژوهش، کاربردهای دیگری مانند بازرسی فضاهای محدود در موتورهای توربین و کمک به گردهافشانی در مزارع عمودی را نیز برای این فناوری متصور است.
میکرورباتها مدتهاست به عنوان ابزارهایی برای محیطهای خطرناک یا غیرقابل دسترس برای انسان مورد مطالعه قرار گرفتهاند. نسخههای پیشین این رباتها معمولاً شکننده بودند، کنترل دشواری داشتند و در برابر جریانهای هوای غیرقابل پیشبینی آسیبپذیر عمل میکردند. تیم پروفسور چن پیشتر نیز ربات دیگری در ابعاد یک حشره و با وزن کمتر از یک گیره کاغذ ساخته بود که طول عمر پروازی بیشتری داشت، اما کنترلر آن به صورت دستی و توسط انسان تنظیم میشد؛ فرآیندی که عملکرد ربات را به دلیل عدم توانایی در مدیریت عدم قطعیتها محدود میکرد.
نوآوری اصلی در نسخه جدید، بازطراحی کامل سیستم کنترلر با استفاده از یک مدل یادگیری عمیق است. این سیستم هوش مصنوعی به جای اتکا به دستورات ثابت و از پیش برنامهریزیشده، رفتار ربات را پیشبینی میکند و مجموعه اقدامات بهینه را برای دنبال کردن یک مسیر مشخص به صورت ایمن برنامهریزی میکند. به عبارت دیگر، کنترلر یاد میگیرد که ربات در موقعیتهای مختلف چگونه حرکت خواهد کرد و حرکات بالهای آن را به صورت آنی تنظیم میکند تا پایداری خود را حفظ کرده و در مسیر باقی بماند.
عملکرد موفق این کنترلر جدید در آزمونهای عملی به اثبات رسیده است. تیم تحقیقاتی نشان داد که ربات توانست ۱۰ چرخش کامل متوالی و پشتک را در ۱۱ ثانیه، حتی در شرایط وزش باد، با موفقیت انجام دهد. به گفته چن، انجام حرکتی مانند پشتک که از چالشبرانگیزترین مانورها برای رباتهای پرنده محسوب میشود، نمایانگر قابلیت ربات برای چرخشهای بسیار سریع است. این توانایی برای مقاومت در برابر تلاطمهای ناشی از وزش باد بسیار کاربردی است. او همچنین اشاره کرد که حشرات پرنده نیز گاهی اوقات در هوا چنین حرکاتی را انجام میدهند.
انگیزه اصلی پروفسور چن برای ورود به حوزه میکرورباتیک، درک فیزیک پیچیده پرواز حشرات بوده است. تیم او برای توسعه این ربات پرنده، آیرودینامیک بالزدن حشرات را به طور گسترده مطالعه کرد تا بتواند حرکت بال حشراتی مانند مگس و زنبورعسل را شبیهسازی کند. نتیجه این تحقیقات، رباتی است که میتواند بالهای خود را ۳۳۰ بار در ثانیه به حرکت درآورد؛ سرعتی که با نمونه بیولوژیکی آن، یعنی زنبورعسل، قابل مقایسه است.
چالش کنونی تیم، توسعه نسخهای با ابعاد کمی بزرگتر ۶ در ۶ سانتیمتر است. هدف از این کار، افزایش ظرفیت حمل بار ربات است تا بتواند حسگرهای بیشتر و باتریهای قویتری را با خود حمل کند. پروفسور چن تخمین میزند که این ربات حدود ۵ تا ۱۰ سال دیگر برای استقرار واقعی در یک مأموریت جستوجو و نجات فاصله دارد.
انتهای پیام/




















