نخستین ربات انسان نما با موتور جت رونمایی شد/ امدادرسانی در بلایای طبیعی و حوادث
به گزارش خبرگزاری علم و فناوری آنا به نقل از اینترستینگ اینجینیرینگ، محققان ایتالیایی در موسسه فناوری ایتالیا (IIT) از اولین ربات انساننما با موتور جت موسوم به آیرون کاب ۳ (iRonCub۳) رونمایی کردند.
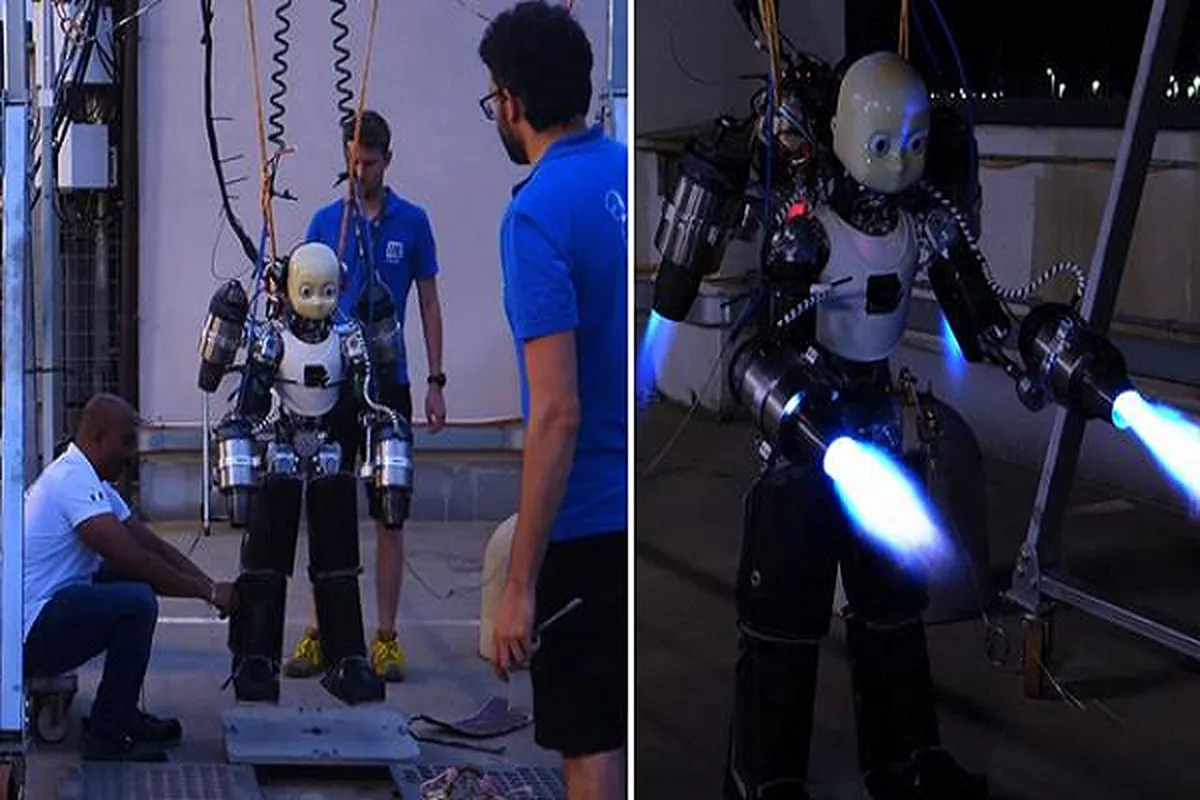
آیرون کاب ۳ با وزن ۱۵۴ پوند و مجهز به چهار موتور جت جمع و جور، برای پرواز و انجام ماموریتهای پیشرفته طراحی شده است که به طور بالقوه تلاشهای امداد رسانی در بلایا را متحول میکند. ربات آیرون آیرون کاب ۳ که مجهز به موتورهای جت است، ۱۵۴ پوند وزن و بیش از هزار نیوتن رانش تولید دارد و دمای اگزوز آن بیش از ۶۰۰ درجه سانتیگراد است.
این ربات بر روی پلتفرمهای آیکاب وی ۲.۵ (iCub v۲.۵) و وی ۳.۰ (v۳.۰) موجود ساخته شده که برای تسهیل توسعه و آزمایش الگوریتمهای هوش مصنوعی تجسم یافته طراحی شده است.
محققان فکر میکنند که توانایی پرواز ممکن است برای این روباتها در کاربردهای خاص از جمله امدادرسانی در بلایای طبیعی مفید باشد، زیرا در حال حاضر یک منطقه ناشناخته تحقیقاتی برای انسان نماها است.
این تیم ایتالیایی تحقیقات خود را در سال ۲۰۲۱ آغاز کردند و در طول آزمایش با چالشهایی مواجه شدند، از جمله این که تلاش کردند تا از آتش گرفتن ربات خود یا حتی انفجار به دلیل اگزوز موتور جلوگیری کنند.
آی کاب دارای ۵۳ درجه آزادی شامل ۹ درجه گردش در هر دست و بیشتر در قسمت بالایی تنه است. این دستگاه مجهز به پوسته تمام بدن، حسگرهای نیرو/گشتاور، دوربین، میکروفون، ژیروسکوپ، شتابسنج و رمزگذار در هر مفصل است.

به گفته محققان ایتالیایی پیچیدگیهای این پروژه فراتر از رباتیک انساننمای سنتی است که شامل سیستمهای چند بدنۀ شدید ترمودینامیک و آیرودینامیک است. الگوریتمهای پیشرفتهای برای کنترل پرواز نیز ایجاد شدهاند که از بهینهسازی برنامهنویسی درجه دوم و محدود برای مدیریت نگرش و موقعیت ربات استفاده میکنند. این چارچوب میتواند با انواع مختلف توربینهای جت سازگار شود و از انطباق با محدودیتهای فیزیکی اطمینان حاصل کند.
تمرکز مهم این تحقیق بر روی توسعه یک الگوریتم برنامهریزی مسیر مبتنی بر حرکت در پایتون بوده است که انتقال پیچیده بین پرواز و راه رفتن را برای ربات انسان نما انجام میدهد. محققان در حال تایید این الگوریتم و آماده شدن برای آزمایش آن بر روی ربات واقعی هستند.
انتهای پیام/