 و روایت ماندگار عاشورا")



طراحی دست رباتیک نرم و ایمن با الهام از طبیعت
به گزارش خبرنگار خبرگزاری علم و فناوری آنا به نقل از اینترستینگ اینجینرینگ، دانشمندان دانشگاه کویمبرا در پرتغال موفق به تولید یک دست رباتیک نرم جدید شدهاند که راحتتر و مقرون به صرفهتر از مدلهای سنتی است.
«پدرو نتو»، دانشمند اصلی این مطالعه گفت: «بیشتر رباتها از مواد سفت و سخت ساخته شدهاند. با این حال، وقتی حیوانات را مشاهده میکنیم، متوجه میشویم که بدن آنها میتواند از قسمتهای سخت مثل اسکلتها و بخشهای نرم مانند ماهیچهها تشکیل شده باشد. برخی از حیوانات، مانند کرمهای خاکی، کاملاً نرم هستند. ما با الهام از طبیعت، پیش میرویم. نسل بعدی رباتها از اجزای ساخته شده از مواد نرم هستند.»
علاوه بر مقرون به صرفهتر بودن، این دست جدید میتواند حرکات واقعی انسان را بهتر تقلید کند که برای تکرار دقیق یک قسمت واقعی بدن طراحی شده است. به منظور اطمینان از تولید انبوه دستگاه، محققان از چاپ سه بعدی و تجزیه و تحلیل اجزای محدود استفاده کردند. نتیجه نهایی یک طراحی بهینه با عملکرد بهبود یافته بود.
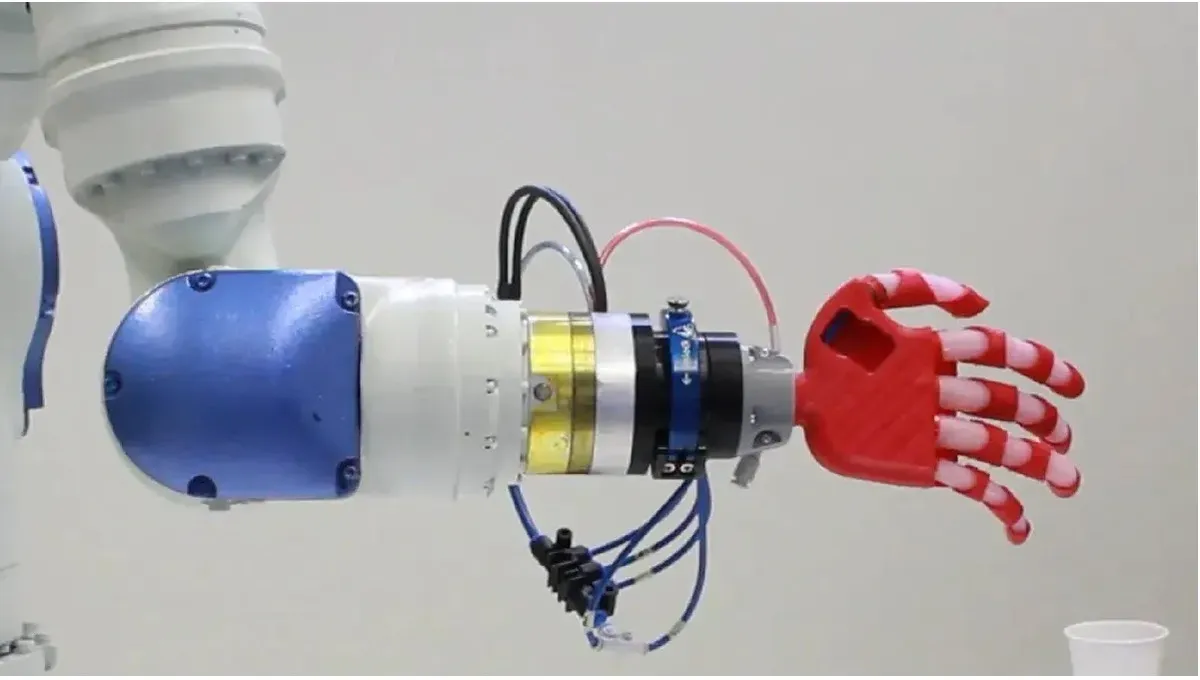
محققان با استفاده از محرکها برای طراحی انگشتان تقریباً واقعی با چابکی بالا دست یافتند. به گفته نتو پیکربندی دست رباتیک شامل پنج محرک نرم است که هرکدام مربوط به یک انگشت است و یک اسکلت بیرونی برای ارتقای خم شدن انگشت. یک کنترلکننده خاموش-روشن (ON-OFF) زوایای خمش انگشت مشخص شده را حفظ میکند و دست را قادر میسازد تا اجسام با اشکال، وزنها و ابعاد مختلف را بهطور مؤثر بگیرد.
این گروه آخرین نوآوری خود را آزمایش کردند و دریافتند که عملکرد خوبی دارد و توانایی در دست گرفتن و کنترل ایمن انواع اشیاء را دارد. اکنون این محقق و همکارانش به انجام مطالعات بیشتر و معرفی کاربردهای هوش مصنوعی تمرکز کردهاند.
نتو افزود: مطالعات بعدی ما بر بهبود ساخت محرکها و حسگرهای نرم متمرکز خواهد بود؛ با هدف افزایش دسترسی به رباتهای نرم برای مخاطبان گستردهتر. کنترل رباتهای نرم با استفاده از هوش مصنوعی یکی دیگر از موضوعات تحقیقاتی است که ما روی آن کار میکنیم.
وی خاطرنشان کرد که دستگاه جدیدش ظرفیت تولید انبوه را دارد. این دستاورد ظرفیت افزایش دسترسی به دستهای رباتیک نرم را دارد و در عین حال هزینهها را کاهش میدهد و روشهای طراحی و ساخت زمانبر را حذف میکند که اغلب به جریانهای کاری تکراری مبتنی بر منابع متکی هستند.
انتهای پیام/




















