



ساخت رباتهای سوسکی با قابلیت تغییر اندازه و شکل
به گزارش خبرنگار فناوری خبرگزاری علم و فناوری آنا، پژوهشگران دانشگاه کلرادو بولدر به تازگی از «حشره رباتیک مفصلی پادار مطیع» موسوم به «CLARI» رونمایی کردهاند.
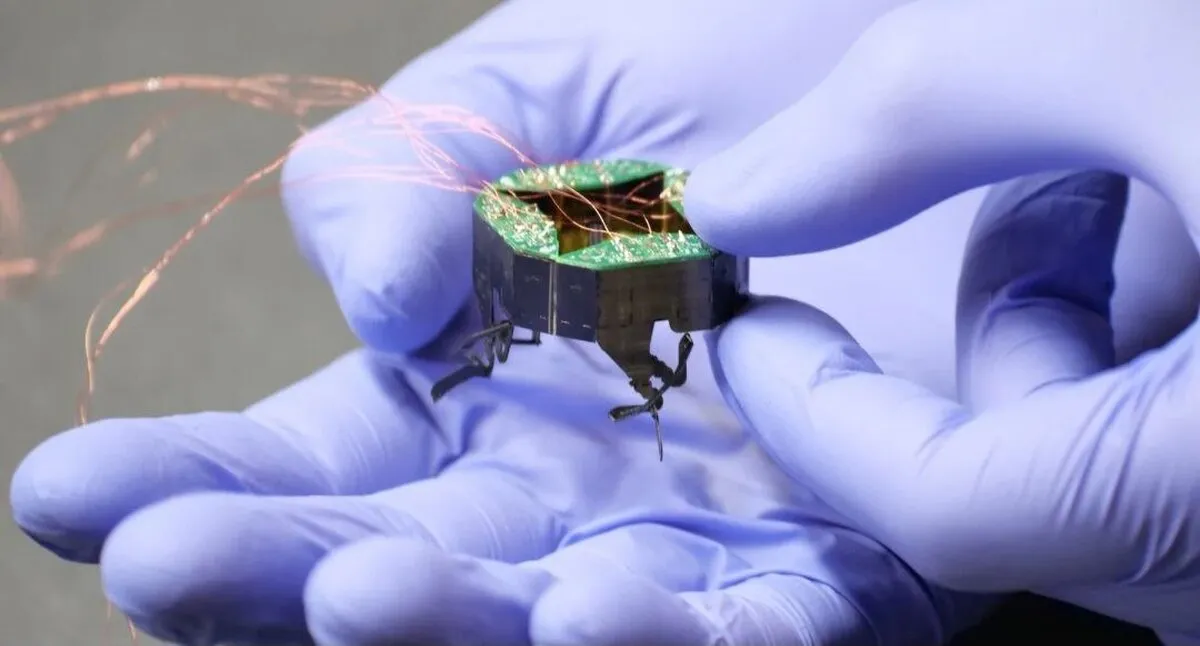
ربات «کلاری» با وزنی سبکتر از یک توپ پینگ پونگ، آن قدر کوچک است که در کف دست جا میشود. این ربات بامزه میتواند بدن خود را به گونهای تغییر دهد که در کوچکترین فضاها نیز قرار بگیرد.
کوچکی و سبکی این ربات نباید گول زننده باشد چرا که ساختار بدنه کلاری به گونهای بهینه سازی شده است که میتواند در فضاهای تنگ خود را فشرده سازی کند.
از این ربات حشره مانند، میتوان به عنوان یک ابزار اکتشافی در مناطق کوچک از جمله موتورهای جت و همچنین حتی در طول ماموریتهای جستجو و نجات استفاده کرد.
«کاشیک جایارام» «Kaushik Jayaram» استادیار مهندسی مکانیک و مجری این طرح، میگوید: برای ساخت کلاریتا حد زیادی از سوسکهای معمولی الهام گرفته شده است. این ربات به گونهای مهندسی شده که میتواند نیمی از ارتفاع خود را فشرده کند، دقیقاً مانند سوسکهایی که از شکافهای کوچک در ساختمانها عبور میکنند.
کلاری در شکل استاندارد خود، شبیه یک مربع با چهار پایه مفصلی است که هر یک توسط محرکها و مدارهای دوگانه خودش کنترل میشوند. با این حال، هنگام مواجهه با یک محیط دشوار، این ربات میتواند از عرض ۱.۳ اینچ به تنها ۰.۸ اینچ باریک شود.
مهندسان پیش بینی میکنند رباتهای کلاری در آینده میتوانند انعطافپذیرتر شوند.
جایارم میگوید: آنچه در پی آن هستیم ساخت رباتهای همهمنظورهای است که بتوانند شکل خود را تغییر دهند و با هر شرایط محیطی سازگار شوند.
وی نسخه نهایی این روباتها را به آمیب تشبیه میکند که «شکل مشخصی ندارد، اما بسته به اینکه نیاز به حرکت سریع یا خوردن مقداری غذا دارد، میتواند تغییر کند.»
با این حال، باید گفت، رباتهای کلاری میتوانند بهجای فرصتهای غذاخوری، از ساختارهای منحصربهفرد و پیکربندیهای مختلف پاهایشان برای عبور از مناطق فاجعه زده در جستجوی قربانیان مفقود شده، یا بازرسی درونی ماشینآلات بدون نیاز به بازکردن کل دستگاه استفاده کنند.
اکنون، این ربات سوسکی هنوز برای برق رسانی و کنترل به اتصالات سیمی نیاز دارد، موضوعی که مهندسان سازنده آن امیدوارند در نهایت موفق به ساخت مدلهای بیسیمی با قابلیت حرکت و کاوش مستقل شوند.
نتایج این تحقیقات در نشریه Advanced Intelligent Systems منتشر شده است.
انتهای پیام/




















