شیرجههای استثنایی ربات دروازهبان+فیلم
به گزارش گروه دانش و فناوری خبرگزاری آنا به نقل از وبگاه (تِک اِکسپلورTech Xplore)، محققان گروه رباتیک هیبریدی دانشگاه کالیفرنیا برکلی، دانشگاه سیمون فرِیزِر و مؤسسه فناوری جورجیا بهتازگی یک مدل یادگیری تقویتی ایجاد کردهاند که ربات چهارپا را قادر میسازد نقش دروازهبان فوتبال را ایفا کند.
این مدل، مهارتهای ربات را در طول زمان، از طریق یک فرایند آزمون و خطا ارتقا میدهد.
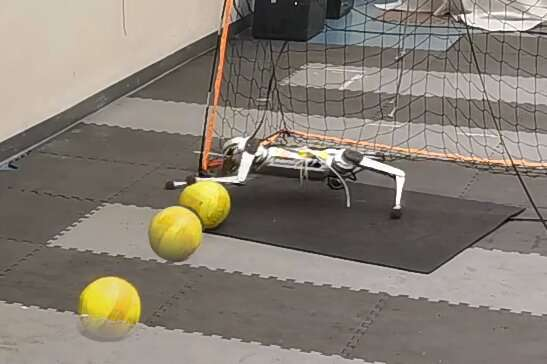
دروازهبانی یک کار جالب اما مشکل است و یک ربات باید به توپی که بهسرعت حرکت میکند واکنش نشان دهد؛ گاهی اوقات در هوا به پرواز درآید، واکنش نشان دهد و با استفاده از حرکات پویا در مدت زمان بسیار کوتاه (معمولاً در یک ثانیه) جلوی توپ را بگیرد.
{kind=link}
هدف اصلی کار جدید محققان، ساختن یک ربات دروازهبان چهارپا بود که بتواند مهارتهای خود را در حین بازی کامل کند؛ درست مانند یک انسان دروازهبان.
برای انجام این کار، محققان یک مدل یادگیری تقویتی طراحی کردند که ربات را از طریق یک فرایند آزمون و خطا آموزش میدهد، نه از طریق یک استراتژی ثابت و مهندسیشده توسط انسان.
محققان توضیح دادند: ربات ابتدا قوانین مختلف کنترل حرکت را میآموزد تا مهارتهای متمایزی مانند بهیکسورفتن، شیرجهزدن و پریدن را انجام دهد و در همین حال، مسیرهای تصادفی انگشتان پایش را ردیابی میکند.
سپس، ربات بر اساس این قوانین کنترلی، یک روش برنامهریزی پیشرفته را برای انتخاب مهارت و حرکت بهینه برای گرفتن توپ پس از بررسی موقعیت آن میآموزد.
محققان مدل یادگیری تقویتی خود را در مجموعهای از شبیهسازیهای بازی فوتبال آموزش دادند. سپس، آن را روی مینی چیتا (Mini Cheetah)، یک ربات چهارپای واقعی که در مؤسسه فناوری ماساچوست (اِمآیتی) طراحی شده بود، بهکار بردند و عملکرد آن را در دنیای واقعی آزمایش کردند.
{kind=link}
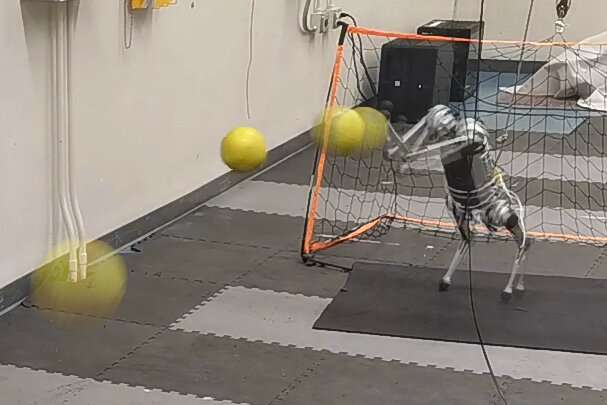
چارچوب یادگیری تقویتی ایجادشده به دست این تیم پژوهشی، تواناییهای ربات مینیچیتا را بهعنوان دروازهبان فوتبال تا حد زیادی افزایش داد. این ربات توانست در آزمایشهای دنیای واقعی ۸۷.۵ درصد از ۴۰ ضربههای تصادفی را بگیرد.
یکی از محققان گفت: به نظر من جالبترین جنبه کار این است که با استفاده از روش پیشنهادی ما، ربات چهارپای مینیچیتا میتواند مهارتهای حرکتی بسیار پویا و چابک مانند پریدن و شیرجهزدن و همچنین مهارتهای دستورزی را با سرعت و دقت انجام دهد؛ مثلاً با استفاده از پاهای در حال چرخش در زمان بسیار کمی توپ را دور میکند؛ این در واقع مرزهای حرکت پاهای ربات را جابهجا میکند.
این ربات میتواند از پاهایش مانند دستانش استفاده کند؛ درست مانند انسان.
مدل یادگیری تقویتی ایجادشده به دست این تیم پژوهشی این قابلیت را دارد که در آینده برای بهبود عملکرد رباتهای طراحیشده برای شرکت در مسابقات روبوکاپ و سایر مسابقات فوتبال رباتیک استفاده شود.
علاوه بر این، میتوان از این مدل برای افزایش چابکی و تواناییهای فیزیکی رباتهای چهارپایی که برای مأموریتهای جستوجو و نجات طراحی شدهاند، استفاده کرد.
محققان امیدوارند در آینده نزدیک بتوانند رباتهای چهارپا را قادر به رقابت با بازیکنان فوتبال کنند.
برای رسیدن به این هدف، رباتها باید حرکات پویا و چابک بیشتری را انجام دهند و در بازی فوتبال به هوش بیشتری دست یابند.
انتهای پیام/